 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15]
страница - 13
Таблица 13.2. Габаритные и присоединительные размеры исполнительных механизмов МИМ-К
Тип колебательного MexajiH3Ma | Диаметр заделки мембраны, мм | Масса, | Размеры, мм | ||
кг | D | Я | В | ||
МИМ-К160-100-02 МИМ-К160-100-05В | 160 | 7,5 10,5 | 200 | 375 430 | 285 |
МИМ-К200-100-02 МИМ-К200-100-05В | 200 | 10,25 13,25 | 250 | 405 460 | 310 |
МИМ-К250-100-10 | 13,5 | 400 | |||
МИМ-К250-100-02 | 250 | 15,25 | 310 | 455 | 340 |
МИМ-К250-100-01В МИМ-К250-100-05В | 18,0 19,75 | 505 | |||
явления на затворе регулирующего органа больших неуравновешенных усилий служит позиционер 22.
Для управления механизмом в случае отсутствия сжатого- воздуха служит верхний ручной дублер, который состоит из корпуса 14, винта Н и маховика 12. Пневматические камеры механизма уплотняются резиновыми кольцами 11 и 15. Трубки пневматического командного сигнала закрепляются гайкой Ю.
Рычажная система механизма состоит из деталей 19-21.
Дублер предназначен для управления вручную затвором регулирующего органа в случае аварийного отклонения сжатого воздуха. Дублеры также могут применяться для ограничения перемещения штока. Механизмы выпускаются с двумя видами ручных дублеров: боковыми и верхними. Комплектация ручными дублерами производится по специальному заказу.
Габаритные и присоединительные размеры механизмов приведены в табл. 13.2.
Рабочее давление н типы позиционеров механизмов МИМ-К аналогичны давлению и типам позиционеров механизмов МИМ и МИМП.
13.3. ГИДРАВЛИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
В системах автоматизации наиболее широкое применение находят гидравлические исполнительные механизмы поршневого типа МГП. Механизмы МГП предназначены для управления рабочими органами пово-
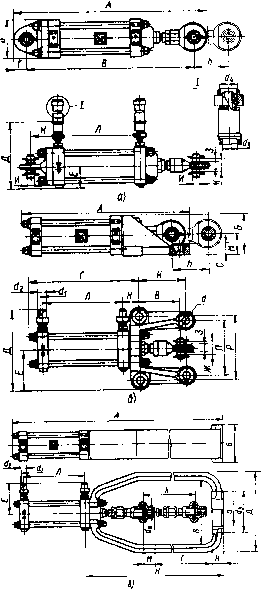
Рис. 13.15. Габаритные и присоединительные размеры гидравлических исполнительных механизмов МГП (без дополнительных блоков):
а — вариант крепления 1; б — вариант крепления 2; в — вариант крепления 3
ротного (не более 90°) или возвратно-поступательного движения и используются в автоматических системах регулирования и управления производственными процессами в различных отраслях промышленности. Исполнительный механизм гидравличе-
6 са | 3 | <N CnI О О | <N — — | (N — о ON | oo oo | о о | oo V-) vO | |||
X | 1 | OO i | to X | 1 | <N X m 2 | 1 | ||||
■в | VO | 1 | ■ 1 | |||||||
1 | oo | 00 | 1 | |||||||
■в | 1 | <N | <N | 1 | ||||||
■в | 1 | VO | 1 | |||||||
-с | о r-1 о Tj- 4D о | О m О <N VO О | о о tN VO О | m о о VO о о — (N | 3 о о — tN | ii | 11 | |||
(N | 1 | 1 | О | i | ||||||
1 | 1 | ё | О oo | |||||||
О | 1 | 1 | ||||||||
а; | 1 | § | ||||||||
S S | 1 | oo | 1 | |||||||
о. М | oo | rn (O | ||||||||
К) а. | r- | lO | oo | |||||||
1 | o | |||||||||
СА | 1 | VO | VO ts | |||||||
1 | о | |||||||||
oo to | OS oo | VO о | oo o\ | |||||||
§ | a\ | (O | V-) 00 tN | to | ||||||
к, | oo (N | VO VO (S | oo | (O | oo 0 m | |||||
in | о | о о | о VO | О | о | |||||
(?v | OO | VO | 0 | |||||||
to | VO | (O | lO | о о oo о | oo | |||||
с L. С 3 с С а. Hi t с | J \ « is | *Л О О f* г* f* m ЧО "О 4D пспп | о rO о Tj- 4D m r-i r-i m 4D | m m m lA О гА О m m го m 4D 4D пссп | rn О VO — о о oo oo | oo | ts 00 oo | о о | s § tN tN | О О О О to lO cc 22 |
С S | cc 22 | с | cc 22 | с t- 2 | CC 22 | |||||
3
О
I
S
3
a
s i с i
§ 13.4
Рекомендации по выполнению сочленений ЯМ с регулирующими органами
443
ский поршневого типа МГП состоит из гидроцилиндра и узлов крепления его к фундаментной плите и к регулирующему органу.
Конструктивно испольнительиые механизмы вБшолнены по блочно-модульиому принципу и могут быть укомплектованы дополнительными блоками: устройствами с гидравлическим, пневматическим или электри-ческим унифицированным входным сигналом; датчиком положения (обратной связи) с электрическим выходным сигналом; гидравлическим устройством, фиксирующим положение выходного элемента механизма при снятии командного сигнала; устройствами для сигнализации конечных положений выходного элемента механизма; гидравлическим переключающим устройством для системы ручного управления от отдельного источника маслоснабжения.
Моитаж исполнительных механизмов заключается в закреплении болтами гидро-цилиидра к фундаментной плите и присоединении к регулирующему органу.
Габаритные и присоединительные размеры механизмов МГП без дополнительных блоков приведены в табл. 13.3 и на рис. 13.15.
13.4. РЕКОМЕНДАЦИИ ПО ВЫПОЛНЕНИЮ СОЧЛЕНЕНИЙ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ С РЕГУЛИРУЮЩИМИ ОРГАНАМИ
Качество работы автоматической системы регулирования или дистанционного управления в значительной мере зависит от способа сочленения исполнительного механизма (ИМ) с регулирующим органом (РО) и правильности его выполнения. Способы сочленения ИМ и РО определяются в каждом конкретном случае в зависимости от типа и конструкции РО и ИМ, их взаимного расположения, требуемого характера перемещения РО и других условий. Существует довольно много способов таких сочленений.
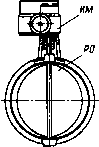
Наиболее простым, компактным и жестким способом сочленения является непосредственное соединение выходного вала (штока) ИМ с валом (штоком) РО. В этом случае перемещение выходных устройств ИМ и РО одинаковы, а скорости равны. Подобные способы сочленения широко применяются при использовании как пневматических мембранных, так и электрических ИМ. Пример сочленения дан иа рис. 13.16.
Наибольшее распространение получили способы сочленения ИМ с РО с помощью
Рис. 13.16. Непосредственное сочленение исполнительного механизма с поворотной заслонкой
промежуточных звеньев; это требует предварительного конструктивного решения при проектировании или при монтаже, что чаще всего и происходит. Оптимальная конструкция сочленения легко реализуется при линейной зависимости расхода регулируемой среды от положения РО и значительно усложняется при нелинейной зависимости. Реальные РО (заслонки, шиберы, клапаны и т. д.) имеют, как правило, нелинейные характеристики и поэтому требуют сравнительно сложного сочленения ИМ с РО.
В качестве ИМ могут быть применены как гидравлические, так и электрические ИМ. Несмотря иа конструктивные особенности и различные технические характеристики, требования к их сочленениям с РО и приемы по выполнению сочленений практически одинаковы.
Ниже приводятся требования к сочленению различных ИМ с РО и рекомендации по наиболее рациональному выполнению сочленений с учетом действительных характеристик РО. Рекомендации составлены по материалам пусконаладочных организаций Союз-техэнерго Минэнерго СССР.
Требования к сочленениям ИМ с РО в общем виде сводятся к следующим: 1) устройства должны быть просты и надежны в работе; моитаж, наладка и регулировка должны быть удобны; 2) в РО и во всех элементах сочленения должны отсутствовать люфты и зазоры; 3) характеристика РО должна быть линейной или близкой к ней; 4) ИМ желательно располагать на одной отметке с РО; 5) ие рекомендуется изготовлять и устанавливать специальные кривошипы на ИМ; следует пользоваться кривошипами, входящими в комплект ИМ, так как они имеют строго постоянные размеры; 6) угол поворота кривошипа ИМ от положения «Открыто» до положения «Закрыто» РО, как правило, следует принимать равным 90°; уменьшение этого угла ведет к увеличению перерегулирования, что отрицательно сказывается на качестве регулирования; 7) все шарнирные соединения должны выполняться
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15]